W-APP +31-646163300 |
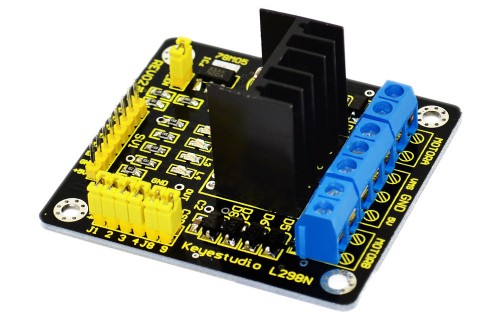
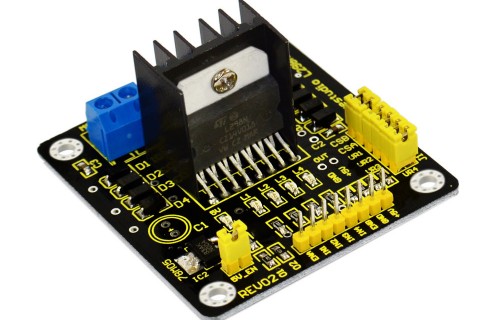
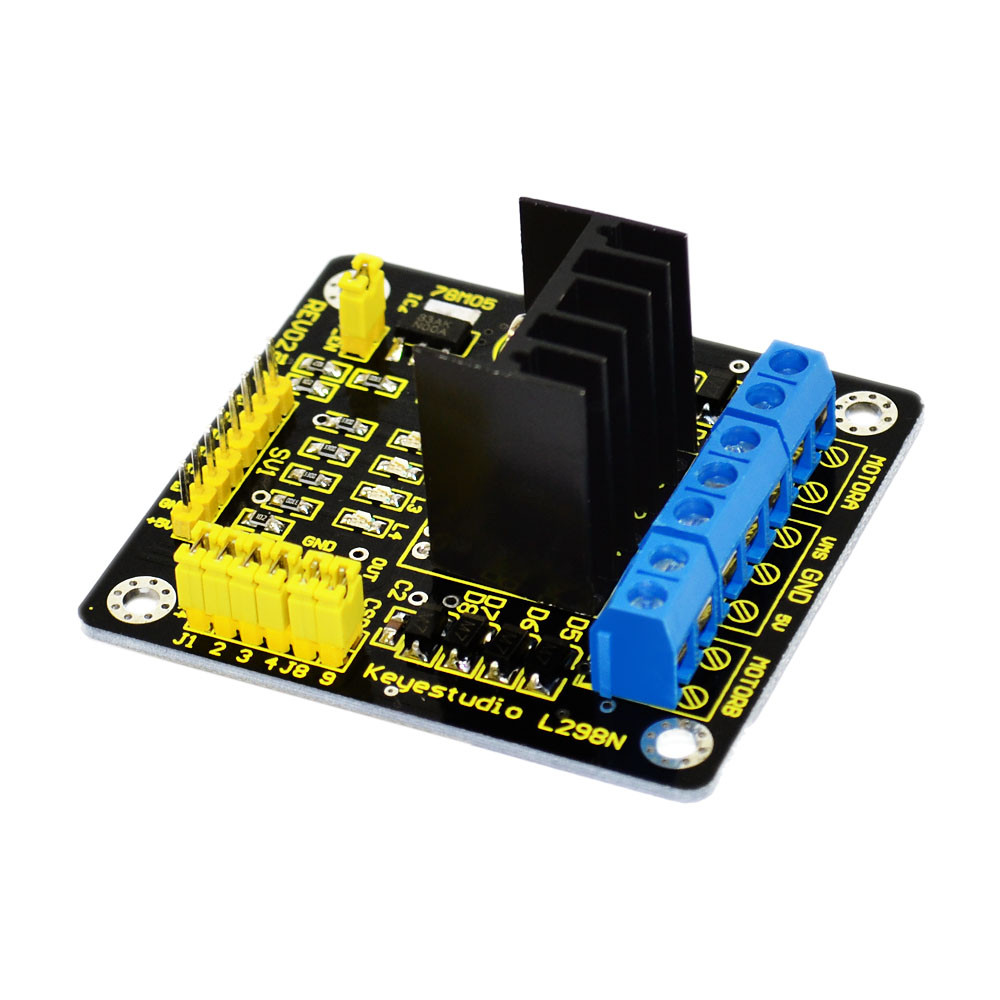
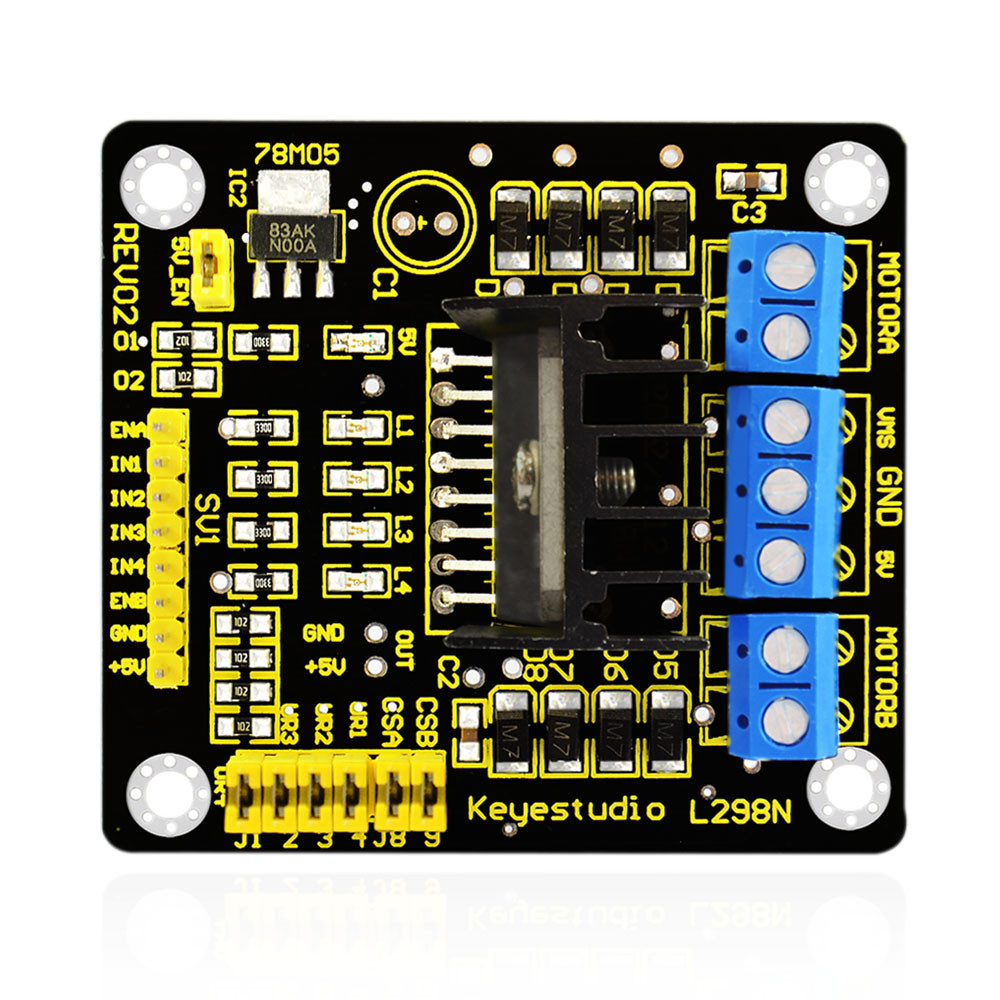
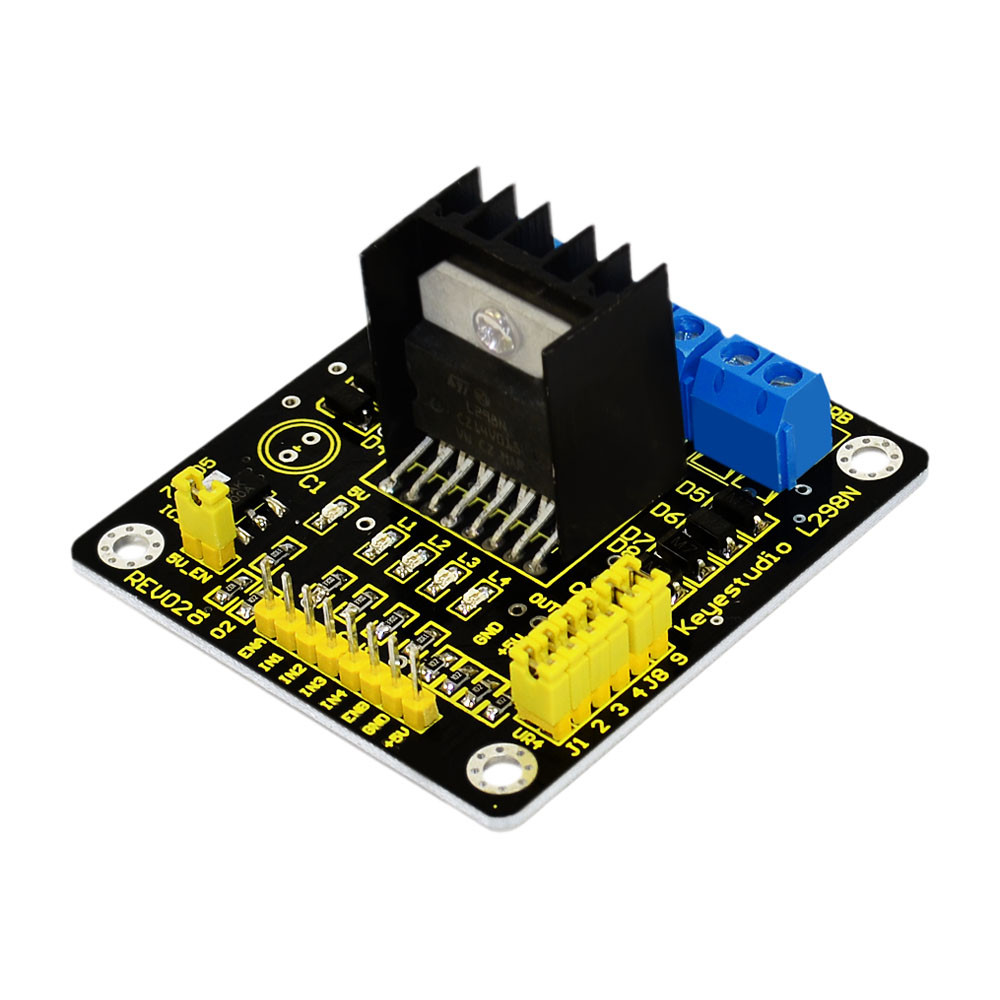
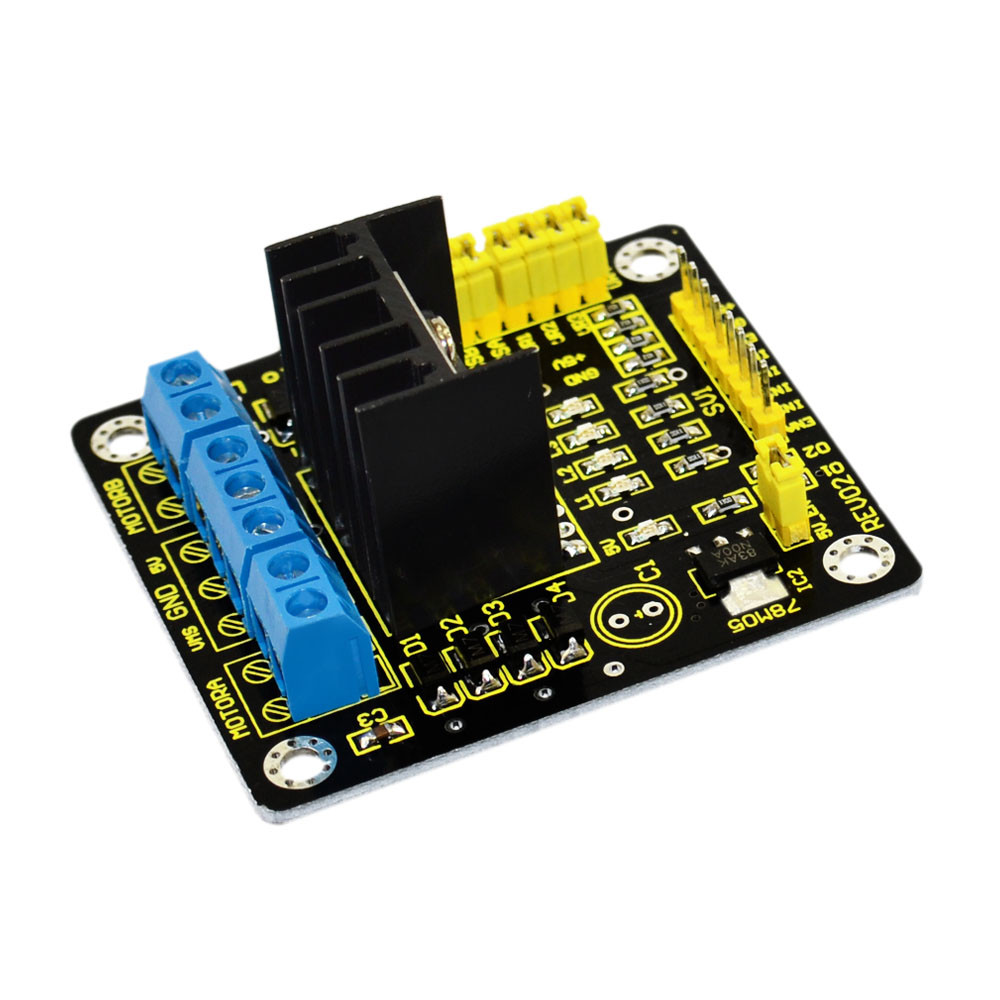
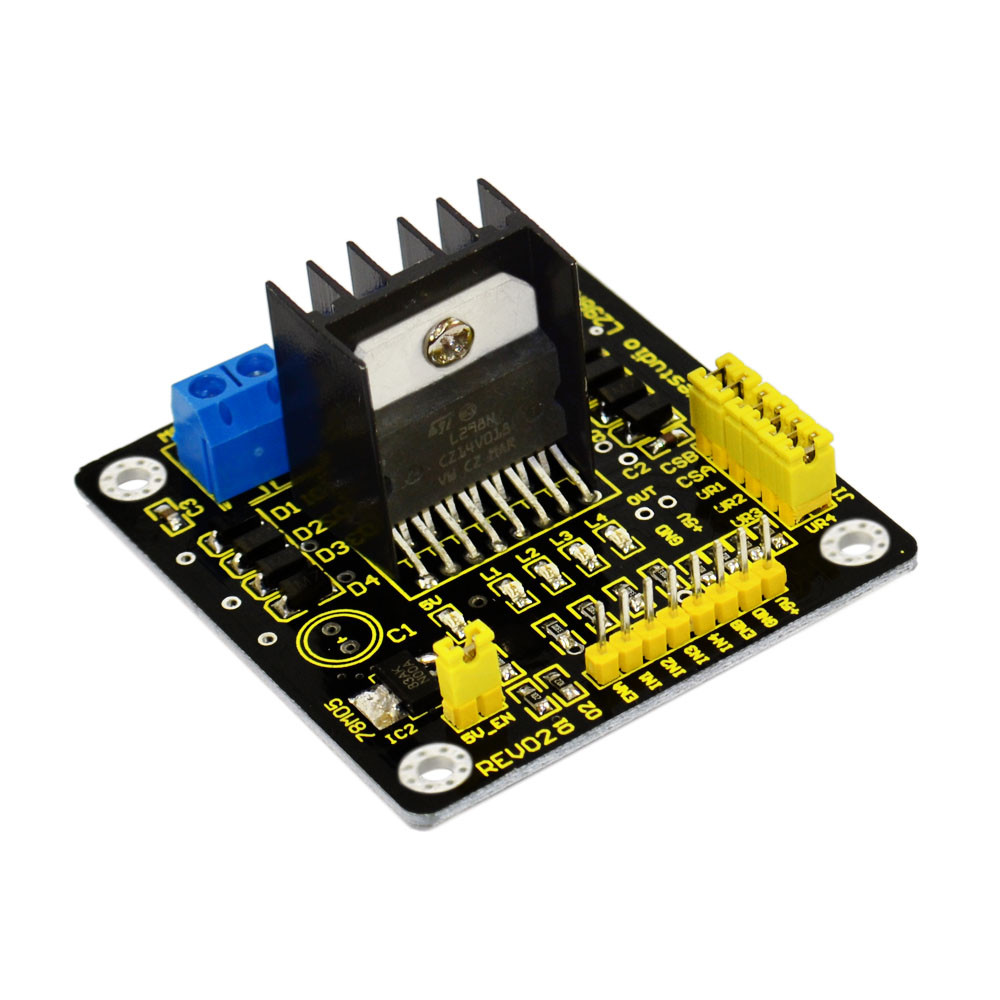
L298N Kalkan Çiftli Köprü H H Arduino akıllı araba robotu için Stepper Sürücü Kontrol Panosu Modülü
tanıtım
Kontrol şirketi ST Company tarafından üretilen L298N kullanılarak, modül güçlü sürüş
kabiliyeti, düşük kalori değeri ve güçlü anti-parazitleme kabiliyeti özellikleri taşıyor.
Bu modül, dahili 78M05'i, bir sürüş güç kaynağı parçası aracılığıyla elektrikli işler için kullanabilir.
Ancak, yonga voltajı dengelemesinin hasar görmesini önlemek için, 12V'den fazla kontrol voltajı
kullanırken lütfen harici bir 5V lojik güç kaynağı kullanın.
Kapasitör kapasitör filtresini kullanarak, bu modül diyotları korumak için akımı izleyebilir
ve güvenilirliği artırabilir.
AÇIKLAMA
çalışma modu: H köprü (çift hat)
kontrol çipi: L298N (ST)
mantık gerilimi: 5V
kontrol gerilimi: 5 V-35 V
akım mantığı: 0mA-36mA
akım davranışı: 2A (MAX tek köprü)
depolama sıcaklığı: (-20) - (+ 135)
maksimum güç: 25 W
ağırlık: 30g
çevre boyutu: 43x43x27mm (G x D x Y)
kod örneği
int EN = 5;
int IN2 = 6;
int IN3 = 7;
int IN4 = 8;
int ENA = 9;
int ENB = 10;
void setup ()
{
for (int i = 5; i <11; i + +) için
{
pinMode (I, EXIT);
}
}
boş döngü ()
{
// CW dönüşü
dijital Yazı (EN, DÜŞÜK);
dijital Yazı (IN2, YÜKSEK);
analogWrite (ENA, 200);
dijital Yazı (IN3, DÜŞÜK);
digitalWrite (IN4, YÜKSEK);
analog yazı (ENB, 200);
gecikme (1000);
// 1 saniyeliğine duraklatma
analog Yazı (ENA, 0);
analog Yazı (ENB, 0);
gecikme (1000);
// CCW dönüşü
digitalWrite (EN, YÜKSEK);
digitalWrite (IN2, DÜŞÜK);
analogWrite (ENA, 100);
dijital Yazı (IN3, YÜKSEK);
digitalWrite (IN4, DÜŞÜK);
analog yazı (ENB, 100);
gecikme (1000);
// 1 saniyeliğine duraklatma
analog Yazı (ENA, 0);
analog Yazı (ENB, 0);
gecikme (1000);
}